Abstract
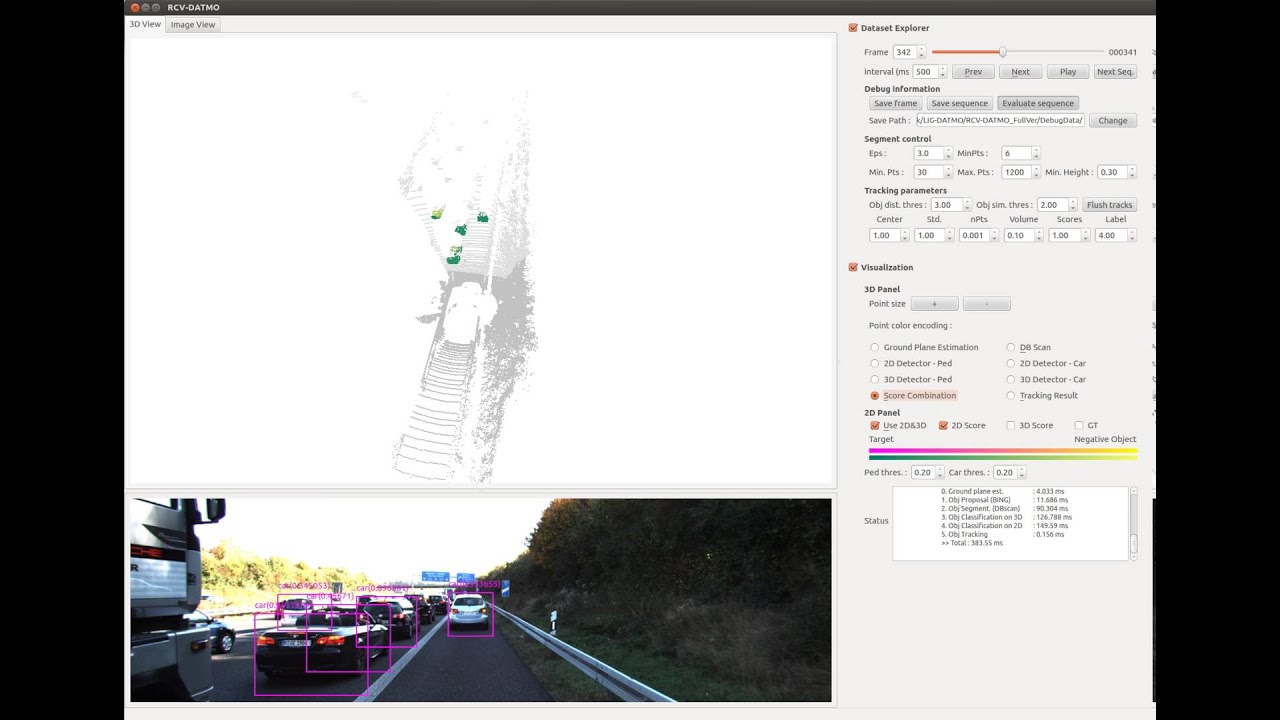
For many robotics and intelligent vehicle applications, detection and tracking multiple objects(DATMO) is one of the most important components. However, most of the DATMO applications have difficulty in applying real-world applications due to high computational complexity. In this paper, we propose an efficient DATMO framework that fully employs the complementary information from the color camera and the 3D LIDAR. For high efficiency, we present a segmentation scheme by using both 2D and 3D information which gives accurate segments very quickly. In our experiments, we show that our framework can achieve the faster speed (∼4Hz) than the state-of-the-art methods reported in KITTI benchmark (>1Hz).
Since the KITTI dataset does not provide ground truth annotation for the test set, we disjointly split the train set into two subsets. We utilize the first subset for train and the other for test.
-
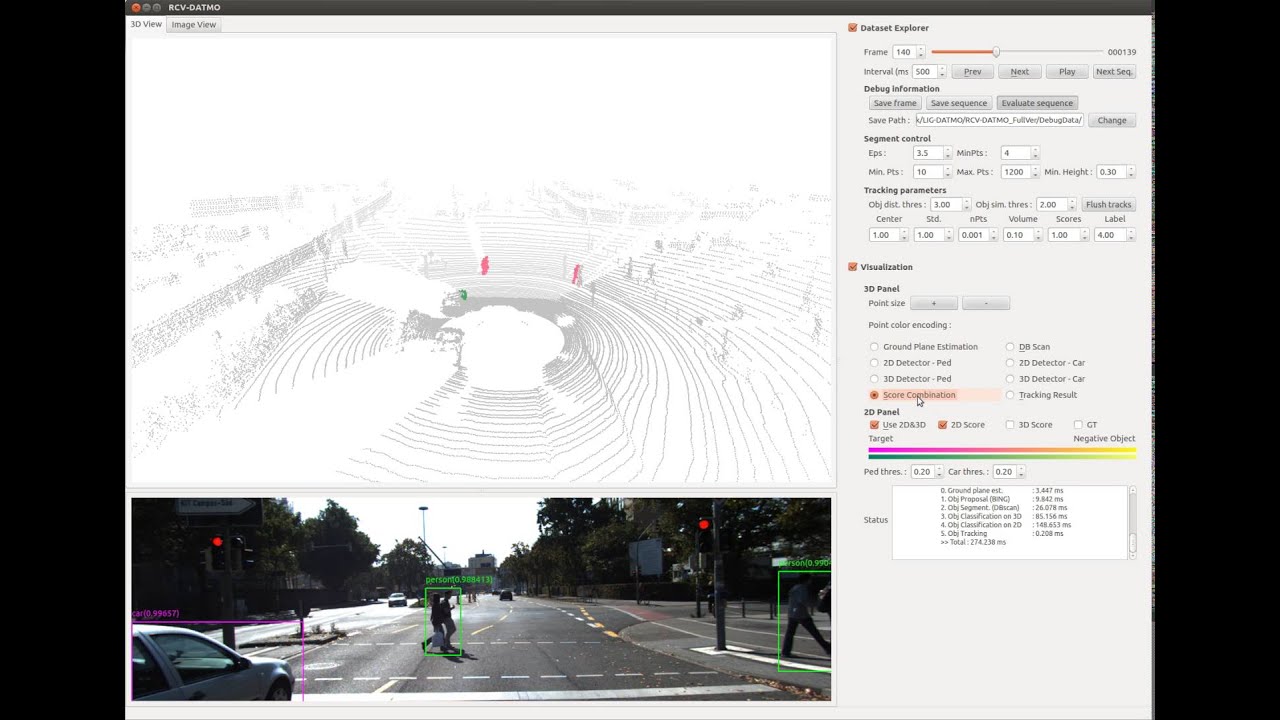
Video 1: Seqence #15 in KITTI training set
-
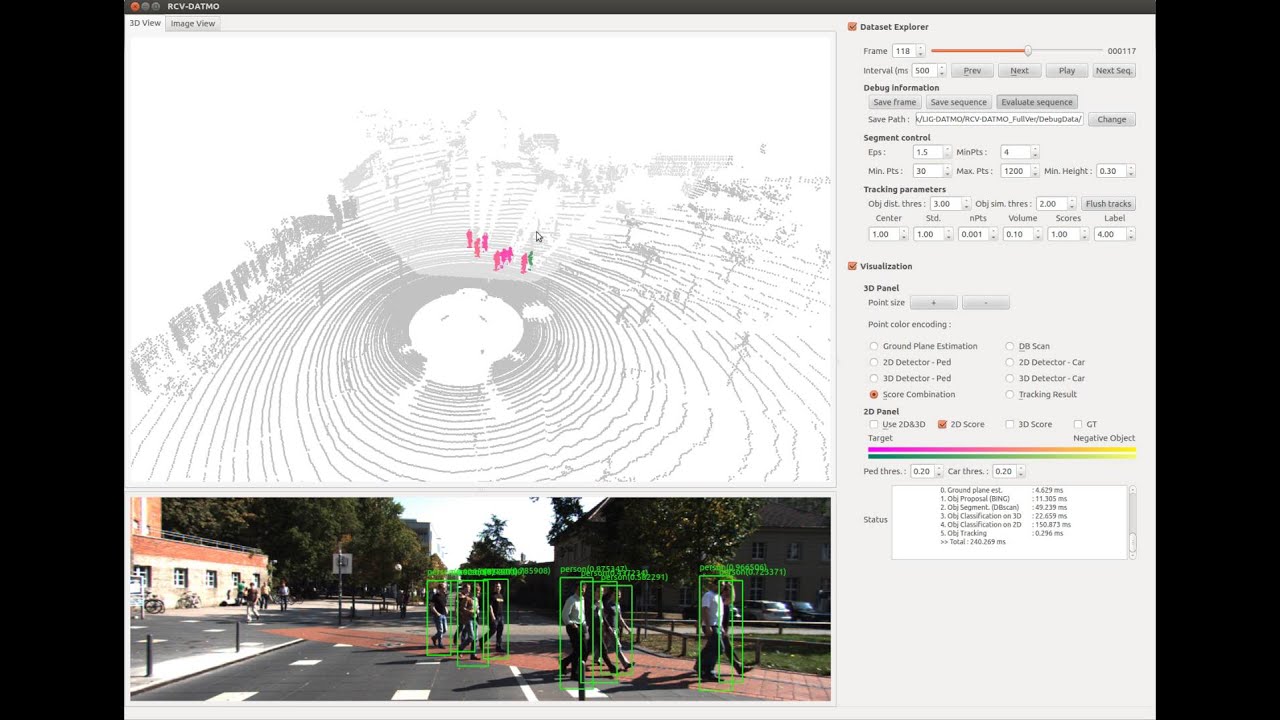
Video 2: Seqence #16 in KITTI training set
-
Video 3: Seqence #20 in KITTI training set